Servo motor
Um servo motor é um pequeno motor de corrente contínua. Diferentemente dos demais motores DC, onde apenas controlamos a velocidade de giro, conseguimos controlar a posição de um servo, através do PWM.
O servo que vamos utilizar nesse exemplo, tem a resolução de meia volta, ou seja, de 0° a 180°.
Materiais Necessários
- 1 Placa Franzininho WiFi com CircuitPython;
- 1 Micro servo 9g;
- 1 Protoboard;
- 1 potenciômetro de 10 kΩ;
- Jumpers.
Circuito
Para os exemplos que vamos ver a seguir, realize a seguinte montagem:
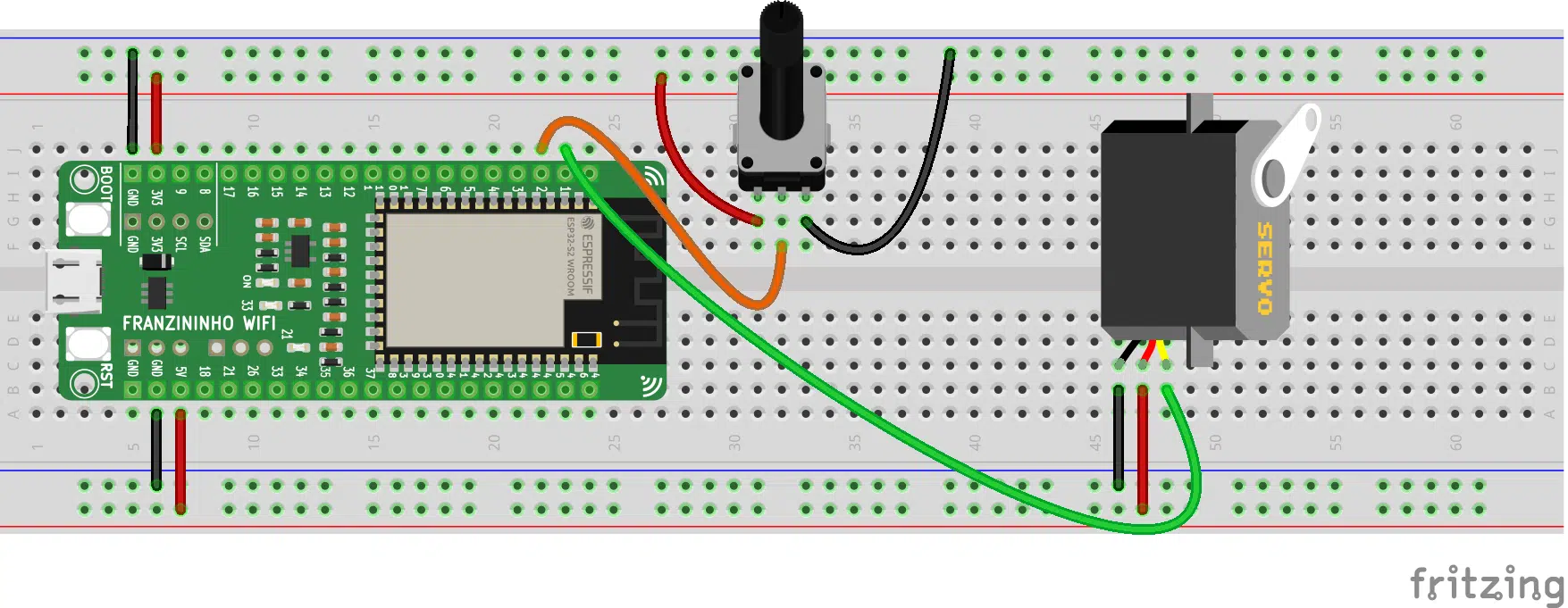
Observação: o servo deve ser conectado ao 5V da placa. E, caso deseje usar mais de dois servos, uma fonte externa deve ser usada.
Códigos
Assim como quando aprendemos a usar PWM, vamos importar o módulo simpleio. Também, vamos importar um novo módulo para trabalharmos com o servo motor.
Para ter acesso a esses módulos, acesse o endereço: https://circuitpython.org/libraries. Faça o download, de acordo com a versão do CircuitPython instalada na sua Franzininho WiFi.
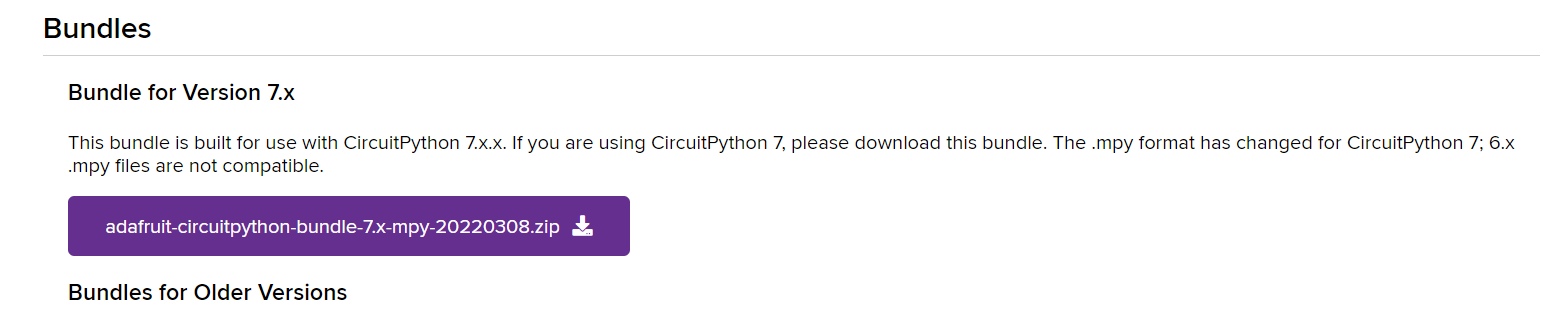
Após finalizar o download, importe os dois módulos para a pasta de arquivos da Franzininho WiFi:
- simpleio.mpy;
- adafruit_motor.
Exemplo 1
No primeiro exemplo, vamos aprender a como programar um servo motor usando CircuitPython. Para isso, copie o código abaixo:
import board
import pwmio
from adafruit_motor import servo
from time import sleep
pin = board.IO1
pwm = pwmio.PWMOut(pin, frequency = 50)
my_servo = servo.Servo(pwm)
while True:
for angle in range(0, 180, 10):
my_servo.angle = angle
sleep(0.1)
for angle in range(180, 0, -10):
my_servo.angle = angle
sleep(0.1)
Salve e execute o código.
Exemplo 2
Já nesse exemplo, vamos controlar o posicionamento do servo através de um potenciômetro. E para isso, vamos usar alguns recursos que aprendemos anteriormente. Escreva o código abaixo:
import board
import pwmio
from adafruit_motor import servo
import simpleio
import math
from analogio import AnalogIn
from time import sleep
pin = board.IO1
pwm = pwmio.PWMOut(pin, frequency = 50)
my_servo = servo.Servo(pwm)
potPin = board.IO2
pot = AnalogIn(potPin)
def converter(pin):
pinValue = pin.value
mapValue = math.trunc(simpleio.map_range
(pinValue, 536, 51355, 0, 180))
return mapValue
while True:
angle = converter(pot)
my_servo.angle = angle
sleep(0.1)
Após terminar de escrever, salve o código e teste-o.
Análise dos Códigos
Exemplo 1
O primeiro módulo que vamos importar, é o board. Ele possibilita o acesso aos pinos da placa:
import board
Para conseguirmos usar os pinos PWM, precisamos do módulo pwmio:
import pwmio
Também, será necessário a biblioteca auxiliar adafruit_motor.servo. Ela será útil para controlar o servo com base na saída PWM:
from adafruit_motor import servo
E, por último, precisaremos da função sleep do módulo time, para intervalos de temporização:
from time import sleep
Agora, vamos atribuir o GPIO1 da placa a variável pin:
pin = board.IO1
Também, configuraremos esse pino como uma saída PWM. Repare, que diferente do LED, precisamos informar a frequência, pois, por padrão ela está configurada com 500Hz e o padrão do servo motor é 50Hz:
pwm = pwmio.PWMOut(pin, frequency = 50)
Além disso, vamos criar o objeto my_servo e atribuir o pino pwm a ele:
my_servo = servo.Servo(pwm)
Por fim, dentro do while True, o nosso loop, faremos com que o servo se mova continuamente. Para isso, usaremos a estrutura de repetição for e o comando range( ), que gera uma lista.
Como parâmetros do primeiro laço, vamos informar o valor inicial (0), valor final(180) e o intervalo de contagem, ou seja, de 10 em 10. Dentro do laço, esse valor será enviado para o servo a cada 0.1 segundos:
while True:
for angle in range(0, 180, 10):
my_servo.angle = angle
sleep(0.1)
Já no segundo laço, faremos o mesmo. Porém, invés de incrementar de 10 em 10, a contagem será decrescente:
for angle in range(180, 0, -10):
my_servo.angle = angle
sleep(0.1)
Exemplo 2
Além dos módulos que já usamos no primeiro exemplo, precisaremos importar simpleio, para usarmos a função de mapeamento:
import simpleio
Vamos precisar também da biblioteca math:
import math
E, da função AnalogIn da biblioteca analogio:
from analogio import AnalogIn
Além de configurarmos o servo, também vamos configurar o potenciômetro. Para isso, primeiro vamos atribuir o GPIO2 a variável potPin:
potPin = board.IO2
Por fim, vamos atribuir esse pino ao objeto pot como uma entrada analógica:
pot = AnalogIn(potPin)
Agora, vamos criar uma função chamada converte. Essa função receberá como parâmetro o pino que estamos lendo:
def converter(pin):
Dentro da função, faremos a leitura do valor enviado pelo potenciômetro e armazená-la na variável pinValue:
pinValue = pin.value
Ademais, converteremos o valor da leitura para graus. Para tal, usaremos a função simpleio.map_range. Os parâmetros dessa função são: valor bruto (valor da leitura naquele instante), valor mínimo de entrada, valor máximo de entrada, valor mínimo de saída e valor máximo de saída. Também, precisaremos da função math.trunc, que eliminará as casas decimais. Todas essas informações ficarão armazenadas na variável mapValue:
mapValue = math.trunc(simpleio.map_range(pinValue, 536, 51355, 0, 180))
E, a função nos retornará o valor de mapValue:
return mapValue
No laço de repetição infinita, while True, atribuiremos o valor retornado pela função converte a variável angle. Esse valor será enviado para o servo motor a cada 0.1 segundos:
while True:
angle = converter(pot)
my_servo.angle = angle
sleep(0.1)
Conclusão
No decorrer da explicação, aprendemos a como usar um servo motor de uma maneira simples utilizando CircuitPython. Também, pudemos ver como usar um potenciômetro para controlar a movimentação dos nossos servos.
| Autor | Mateus Adriano Ventura Vieira |
|---|---|
| Data: | 17/05/2022 |